Research
Our research focuses on the analysis and synthesis of digital images as well as advanced human computer interaction. Thereby we combine concepts from computer graphics, computer vision, computer science, applied mathematics and physics.
Below you find a short overview of some of our different preceding and ongoing research projects. Please also look
here.
DeepLearningCargo
|
|
The DeepLearningCargo project will primarily contribute to basic research in the area of AI generalization and explainability. However, in the orientation of its scientific research design for hypothesis testing, it will take up aspects from the areas of Aviation Next Generation, logistics, mobility and digital transformation. In this respect, the project addresses central topics of the HOLM research agenda.
|



ATRIUM – dATa dRiven sImulation ob bUlk Materials
|
|
In this R&D project, a new framework will be developed with which the simulation and visualization of various bulk materials can be carried out in real time. In contrast to current simulation methods, a new data-based approach will be used, where the behaviour of the bulk material is predicted with the help of AI instead of being calculated on the basis of physically motivated equations. Using the results from classical calculations, training data is generated and a suitable regression model is developed to train a convolutional neural network to predict the simulation results. This promises a considerable acceleration of the simulation calculation. The saved computing power is then used to achieve a more detailed and realistic visualization or to enable certain simulations even on less powerful devices.
|


VIDEOTRACK 2D/3D
|
|
In this project, the basis shall be created to solve a number of different tracking problems by means of optical measurement methods. Essentially, a flexibly configurable software system is to be designed and implemented. On the one hand, the system should be able to process and store different input data (e.g. images of different (mono and stereo) camera systems and signals from microphones). It must be ensured that the corresponding signals can be synchronized in time.i In addition to a manual mode, in which the tracking of a piece of sports equipment is explicitly started by the user of the software, various automatic or semi-automatic procedures are also planned, in which a tracking process is triggered, for example, by an external signal (trigger via network or audio signal from a microphone) or by events detected in the video stream. With the planned system, not only different trigger modes but also different tracking methods should be possible. The range is to range from simple brand-based methods, which also work with inexpensive webcams, to complex brand-less methods, which do not require any augmentation of the corresponding sports equipment.
|

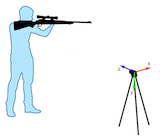
TRACKSHOT: Tracking of Shotgun and Target for Olympic Trap and Skeet

|
The research project TRACKSHOT (Tracking of Shotgun and Target for Olympic Trap and Skeet) is a joint research project with the German
Shooting Federation (DSB).The aim of the project is to detect and track the position and orientation (pose) of the shotgun together
with the position of the target simultaneously in a common coordinate system. The resulting performance-diagnostic hardware component
and a suitable software application should enable both the athlete and the trainer to have an accurate and timely evaluation and interpretation
of the data. Beside the development of a robust and accurate marker-based tracking system, one of the main focuses of the project is to set the
basis for a completely marker-less system, that enables tracking without the need of hardware to be attached to the sports equipment in order
to have a completely non-reactive system. Particularly suitable for this initial tests for the development of such a marker less optical tracking
system is the shotgun due to its size and thus good visibility. Thus, a feasibility study for marker-less tracking is conducted within the project.
If this proves to be feasible, it would be dealt with in follow-up applications for other sports equipment such as air gun or bow.
|

OPTIGAMA: Optical Short Game Motion Analyzer
|
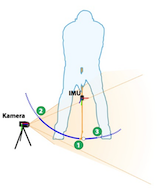
The research project OPTIGAMA (Optical Short Game Motion Analyzer) is embedded in the research project SHOGAMA (Short Game Motion Analyzer) which is
a joint project together with the Science & Motion Sports GmbH in Flörsheim and the institute of computer science of the Johannes Gutenberg University Mainz.
The aim of SHOGAMA is to develop a highly accurate realtime system for three-dimensional tracking of the golf cub during short game. The complete system will be composed of an inertial measurement unit (IMU) attached to the golfs cub handle as well as a camera observing the head of the golf cub. The aim of OPTIGAMA is to
determine the golf cub position and orientation (pose) while it is inside the cameras field of view based on the camera footage. The determined pose can be additionally refined and verified based on the data obtained by the IMU. On the other hand pose information can be achieved only based on IMU data if the golf cub is outside the
cameras field of view. This combination allows to monitor the complete golf stroke mechanics.
|


Fish Biodiversity Estimation by Low-Cost Non-Destructive Video Based Sampling (FIBEVID)
|
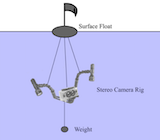
The DAAD funded project FIBEVID is a joint project of the DCSM department of RheinMain University of Applied Sciences (HSRM, Wiesbaden/Germany) and the National University of Science and Technology (NUST, Islamabad/Pakistan), while the Pakistan Museum of Natural History (PMNH) will accompany the project as an application partner.
In FIBEVID underwater computer vision technology will be employed for an automated surveying of fish species. The project includes the construction and deployment of suitable underwater camera rigs, as well as the development of innovative software for a semiautomatic localization, tracking, measuring and classification of underwater species. The result of FIBEVID will form the basis for a non-invasive, low-cost surveying of Pakistan’s fish population, and benefit the preservation of endangered species as well as a more sustainable economic exploitation of Pakistan’s resources.
|

Kephalos: Strahlungsarme 3D-Rekonstruktion des Gesichtsschädels auf Basis multimodaler Eingabedaten
|
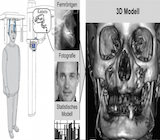
Orthodontic motivated radiographs substantial contributes to radiation exposure of children and adolescents. Especially since the introduction
of dental digital volume tomography (DVT), the use of 3D radiographs is increasingly propagated. Because DVT devices typically generate 3D
information from several hundred 2D radiographs, the effective dose of a DVT recording is at least an order of magnitude greater than that of a
single digital lateral cephalogram. However, for many diagnostics a complete 3D model often is not needed, but only the outer (facial) surface
of the facial skeleton. The aim of Kephalos is to develope a new technique for calculating the exact facial surface of the facial bones based on
a) a single lateral cephalogram, b) an optical face scan and c) a statistical model of the correlation between the facial surface and the facial bones.
|

MTM Auto Code Generator: Entwicklung eines Systems zur Analyse von Bewegungsabläufen in der Montage zur automatisierten Generierung von MTM Codes zur schnellen und eindeutigen Klassifizierung von Arbeitsvorgängen

|
Methods-Time Measurement (MTM) is often applied in industrial settings whenever any manual operation or task is performed during the manufacturing process. It is used to analyze and optimize motion sequences of workers and thereby determine standard times in which a
worker can complete the individual tasks. Thus one of the basic requirements of MTM is the ability to capture, and classify the movement of
workers while executing these tasks. This research project aims to automate this by applying and fusing motion tracking methods based on
various sensors. We develop a system to accurately capture the motion of a worker, employed tools and components and simultaneously
segment and classify these motion sequences. For tracking components and tools we investigate a novel optical passive tracking algorithm
since it is impractical to augment these parts with any sensor or marker attachment in this setting.
|


KOLIBRI: KOLlektive Intelligenz unBemannteR MultIcopter

|
The viability of small and cheap autonomous aircrafts opens up a whole new field of civilian applications. In this research project
we are developing a low budget system to do research in the field the swarm behavior of small autonomous aircrafts. Our system
is based on an affordable high speed optical tracking system with high accuracy and a software component for remote controlling
arial vehicles, both systems are developed in our lab. Based on very small multicopters with a maximum weight of 50g,
we investigate autonomous aircraft swarms and develop new algorithms to enable collaborative strategies for solving problems such
as generating maps of an environment or identifying best paths to victims. The latest results can be found here.
|
Optishot: Entwicklung eines Mess- und Auswertesystems zum Einsatz im Schießtraining zur Optimierung der Bewegungsabläufe und damit der Zielgenauigkeit und Identifizierung sowie Behandlung des Schießkrampfes
|
Professionals who carry firearms on man (e.g. police officers), must be specially trained to deal with them.
The training largely consists of repetition exercises in which the movement, including firing be rehearsed
"process-safe". Existing measurement methods are very limited for a detailed analysis of the training
shots and practical instructions to improve the sequence of movements. In addition, there is a disease
(that is also known by golfer and called "yips"), which may lead to occupational disability, if it is not diagnosed
early. In this research project we develop a new measuring method which precisely determine and evaluate
the 3D movement and automatically creates instructions to improve the motion sequence.
|


VEDUS: Virtuelle editierbare 3D-Stadtmodelle
|
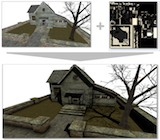
Many tasks in the field of urban planning, such as noise protection measures, the incidence of light, or radio coverage require 3D data.
Complete 3D city models thus gradually replace conventional maps. But the creation and maintenance of 3D city models is very complex
and costly. The goal of this research project is to develop a system that allow editing of 3D city models by various users using al kind of
different devices. Users should be placed in a position to visualize and collaboratively edit the models on all kind of devices from the
traditional desktop PC to Tablet PCs and smartphones.
|

|
Dieses Projekt (HA-Projekt-Nr. 315/12-05) wurde im Rahmen von Hessen ModellProjekte aus Mitteln der LOEWE – Landes-Offensive zur Entwicklung Wissenschaftlich-ökonomischer Exzellenz, Förderlinie 3: KMU-Verbundprojektvorhaben gefördert.
|
AUTOMEX: Automatische Extraktion von Mittelflächenbeschreibungen aus 3D-CAD-Volumenmodellen

|
Many simulations like crash-tests, pedestrian vehicle interactions, vibration or noise analysis depend on
simplified finite element models, which have to be generated from existing 3D-CAD models. The AUTOMEX
project develops automated methods to compute medial axis representations for arbitrarily complex thin-walled
components such as synthetic materials and cast metal parts. For further information please visit our project website.
|

|
Dieses Projekt (HA-Projekt-Nr. 300/11-45) wurde im Rahmen von Hessen ModellProjekte aus Mitteln der LOEWE – Landes-Offensive zur Entwicklung Wissenschaftlich-ökonomischer Exzellenz, Förderlinie 3: KMU-Verbundprojektvorhaben gefördert.
|
APOLLON: Ein universelles Rendering-Werkzeug für das Erzeugen von „gebackenen" Lichteffekten in 3D Spielen, Simulations- und VR-Anwendungen